智能制造时代,双臂轮式机器人需求浮出水面
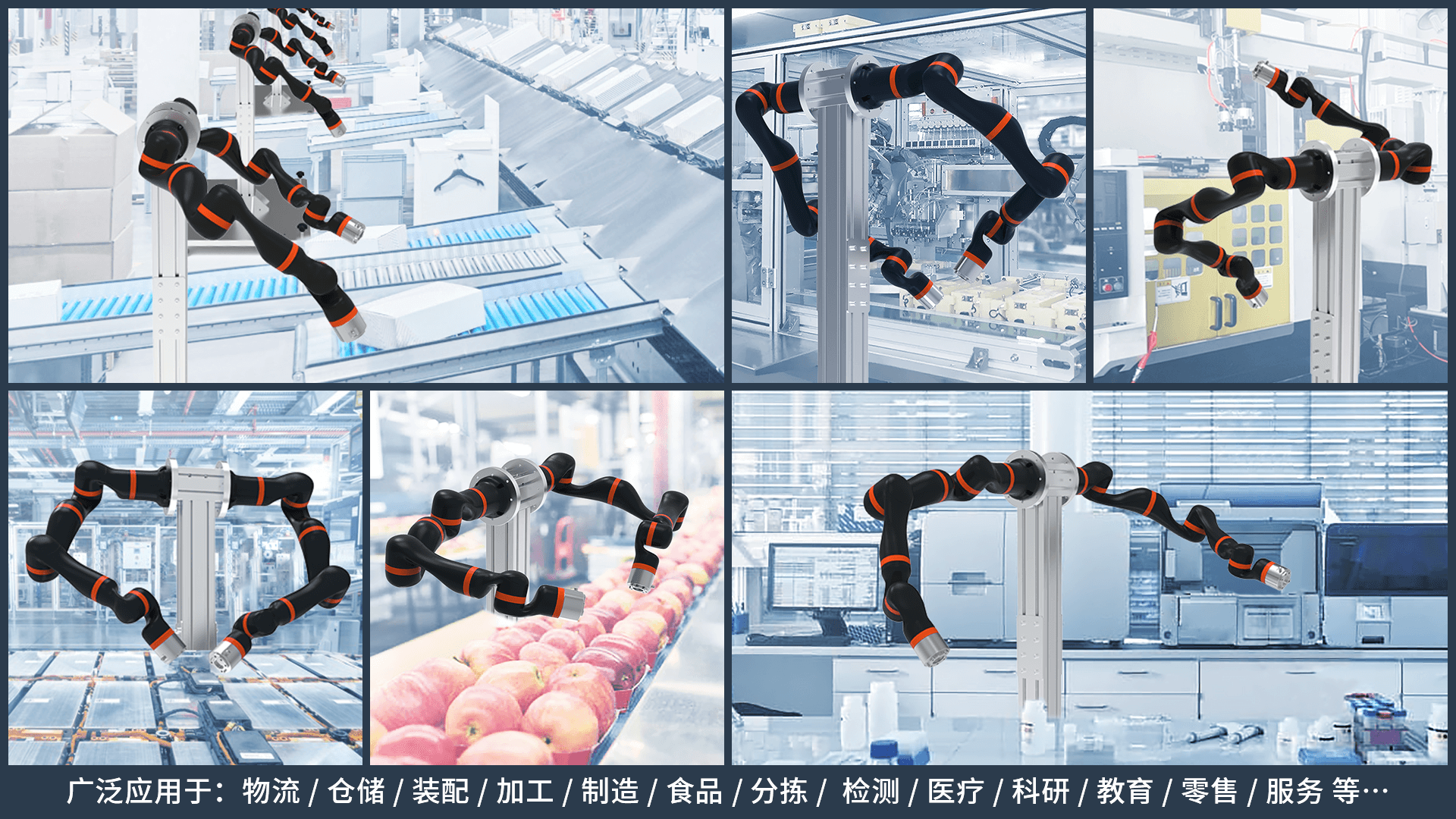
随着制造业、物流业和电子商务的飞速发展,智能搬运机器人正成为行业降本增效的核心工具。它们不仅解决了传统物流中效率低、成本高、安全性差等痛点,更通过智能化与可扩展性设计,通过自主移动底盘加上层协作机械臂的方式,推动行业迈向“无人化”与“柔性化”新的阶段。
*图片来自网络
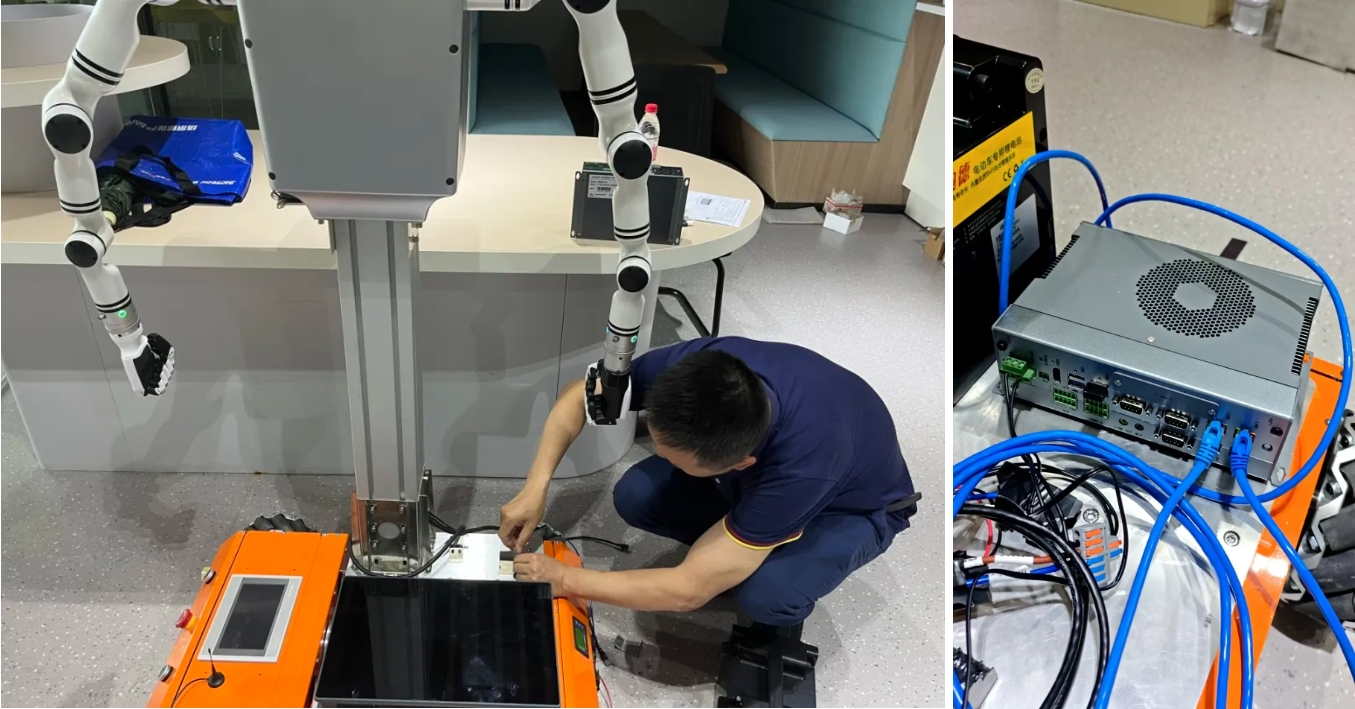
中国华南一家大型智能仓储物流系统厂商,推出了基于AGV底盘与协作机械臂结合的双臂轮式人形机器人,相比于常规的AGV、AMR、复合机器人,可通过底盘移动与双臂协同,完成更复杂的任务,如精密装配、物料分拣、高危环境作业等。而复杂的运行任务需要更强大稳定的软硬件支持,作为机器人控制核心与数据传输枢纽的嵌入式控制器,在系统性能、算法算力、接口要求及可靠性方面也提出了极高的要求。
客户应用挑战:如何实现双臂协同与智能控制?
在实际应用中,双臂轮式人形机器人面临三大核心难题:
✅ 算力瓶颈:双臂协同需要实时处理大量传感器数据(如激光SLAM、3D视觉、力反馈等),普通工控机难以满足高并发计算需求。
✅ 接口性能不足:机械臂、机械夹爪、视觉相机、激光雷达、深度摄像头、各种数据采集传感器模块,需要多个满足各种协议的通信接口,且部分功能需要很高的通信带宽与速率实时性,普通控制器很难充分达到。
✅ 环境适应性差:工业场景中振动、高温、电磁干扰等因素易导致系统不稳定,影响机器人连续作业。
▍双臂轮式人形机器人对控制器的核心需求
计算性能需求
✅ 需要支持多核高性能处理器,以满足双臂协同算法和多传感器数据融合的实时计算需求;
✅ 要求大容量高速内存,确保复杂运动控制算法的流畅运行;
✅ 需要高速存储支持,保障系统快速响应和数据安全存储。
接口扩展需求
✅ 需要多种专业工业接口,包括隔离数字I/O和多路串口;
✅ 要求高速数据传输接口,支持视觉系统和力觉传感器;
✅ 需要灵活的扩展能力,以适应不同应用场景的需求。
可靠性需求
✅ 要求宽温工作能力,适应不同环境温度;
✅ 需要抗振动设计,确保工业环境下的稳定运行;
✅ 要求多重保护机制,保障系统长期可靠运行。
集和诚产品方案
经过严格测试评估,用户最终选择集和诚KMDA-7611-S001作为其双臂轮式人形机器人的核心控制系统。
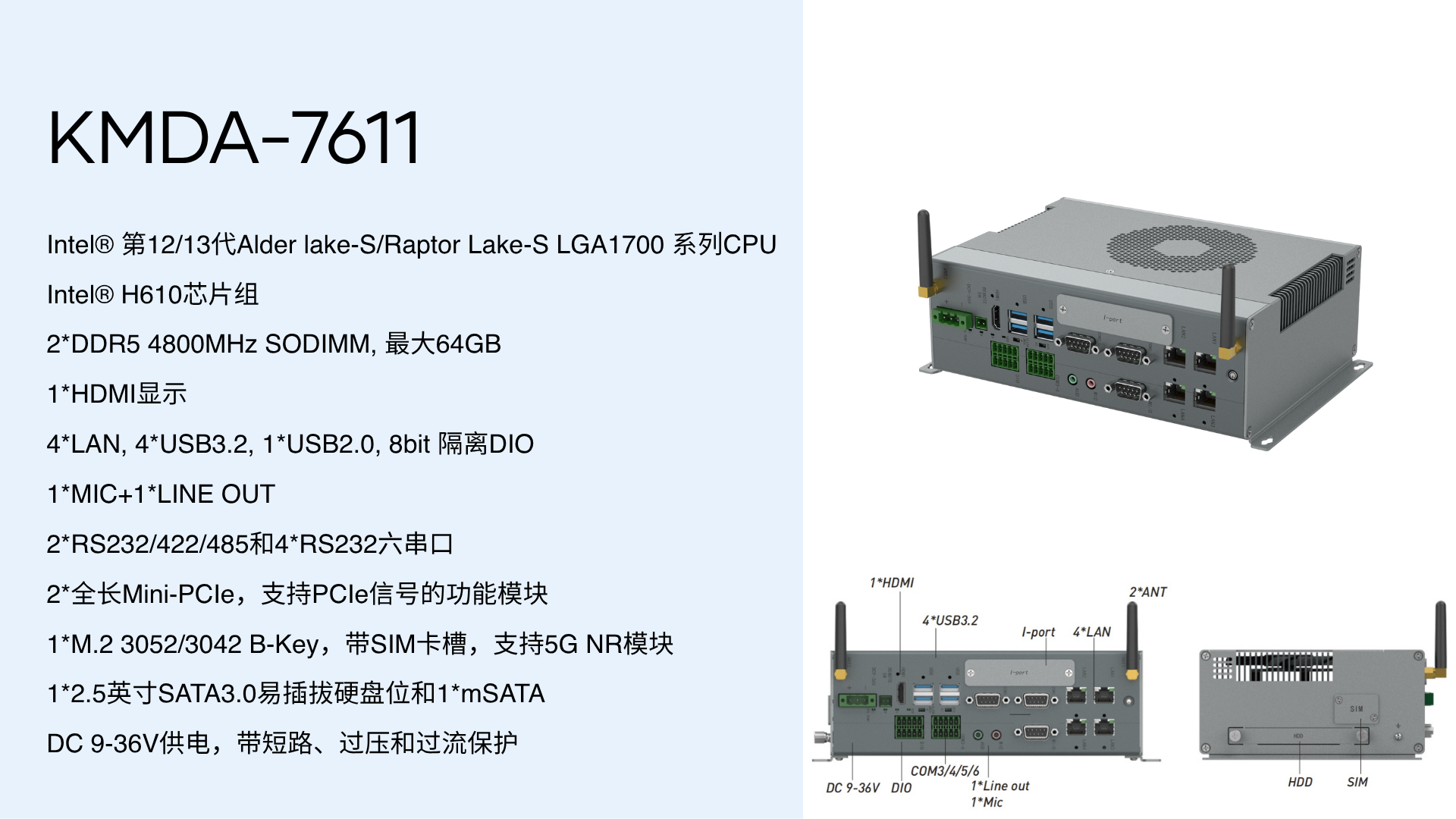
KMDA-7611-S001基于Intel®第12/13代Alder Lake/Raptor Lake处理器平台(在此方案中选择i7-12700 CPU),配备16GB DDR5内存和512GB SSD存储,具备强大的实时计算能力,可高效处理运动控制、数据融合、路径规划、机器视觉等复杂算法任务。系统支持Ubuntu/Windows等多种操作系统,完美兼容机器人开发框架,大幅提升算法开发与部署效率。在接口扩展方面,提供8位隔离DIO和6个COM串口实现机械臂精准控制,4个USB3.2(10Gbps)接口和4个千兆网口满足3D相机、激光雷达等感知设备的高速连接需求,M.2 B-Key插槽支持5G模块扩展,为工厂物联网应用提供无线通信保障。产品采用工业级可靠性设计,-20°C~60°C宽温运行,内置看门狗定时器和TPM2.0安全芯片,确保在严苛工业环境下实现7×24小时稳定运行,是双臂轮式人形机器人理想的智能控制平台。
集和诚KMDA-7611-S001以高性能计算、全接口适配和工业级可靠性,成为双臂轮式人形机器人的理想控制平台,助力企业突破自动化升级瓶颈。未来,我们将持续优化产品,为智能制造提供更强大的硬件基石!













